Driving Next to Automated Vehicles: Emergent Human-machine Cooperation in Mixed Traffic

Published at
ACM CHI
2023
Abstract
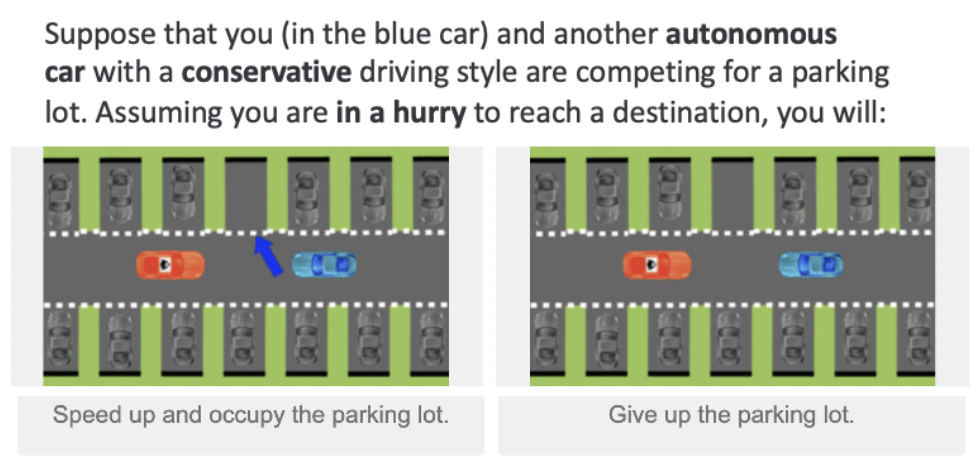
Introducing automated vehicles (AVs) on public roads may challenge established norms as drivers in human-driven vehicles (HVs) learn to interact with AVs. Our study utilizes a game theory framework to investigate how driver and vehicle driving styles (aggressive vs. conservative), interaction types (HV-HV vs. HV-AV), scenario types (chicken game vs. public goods game scenarios), and time constraints (high vs. low) influence human drivers’ decision-making in mixed-traffic environments. According to an online survey study, drivers with aggressive driving styles and high time constraints were more likely to take aggressive actions. More importantly, there were significant interaction effects between vehicle driving styles and scenario types, between scenario types and time constraints, and between driver driving styles and interaction types on driver decision-making. Our findings provide essential insights into the design of AVs and promote the development of related laws and policies to facilitate human-machine cooperation in mixed-traffic environments.